Project information
Project Description
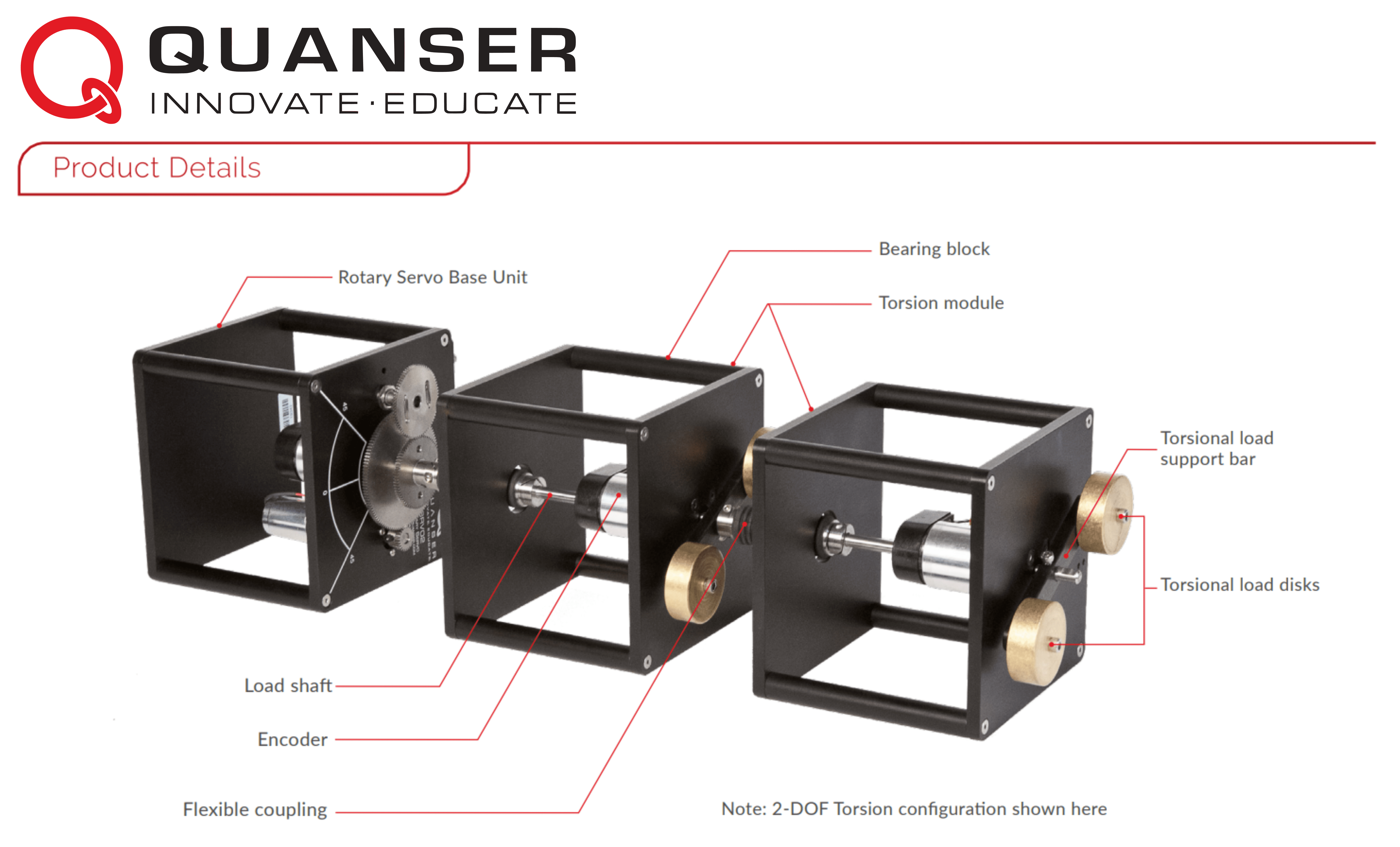
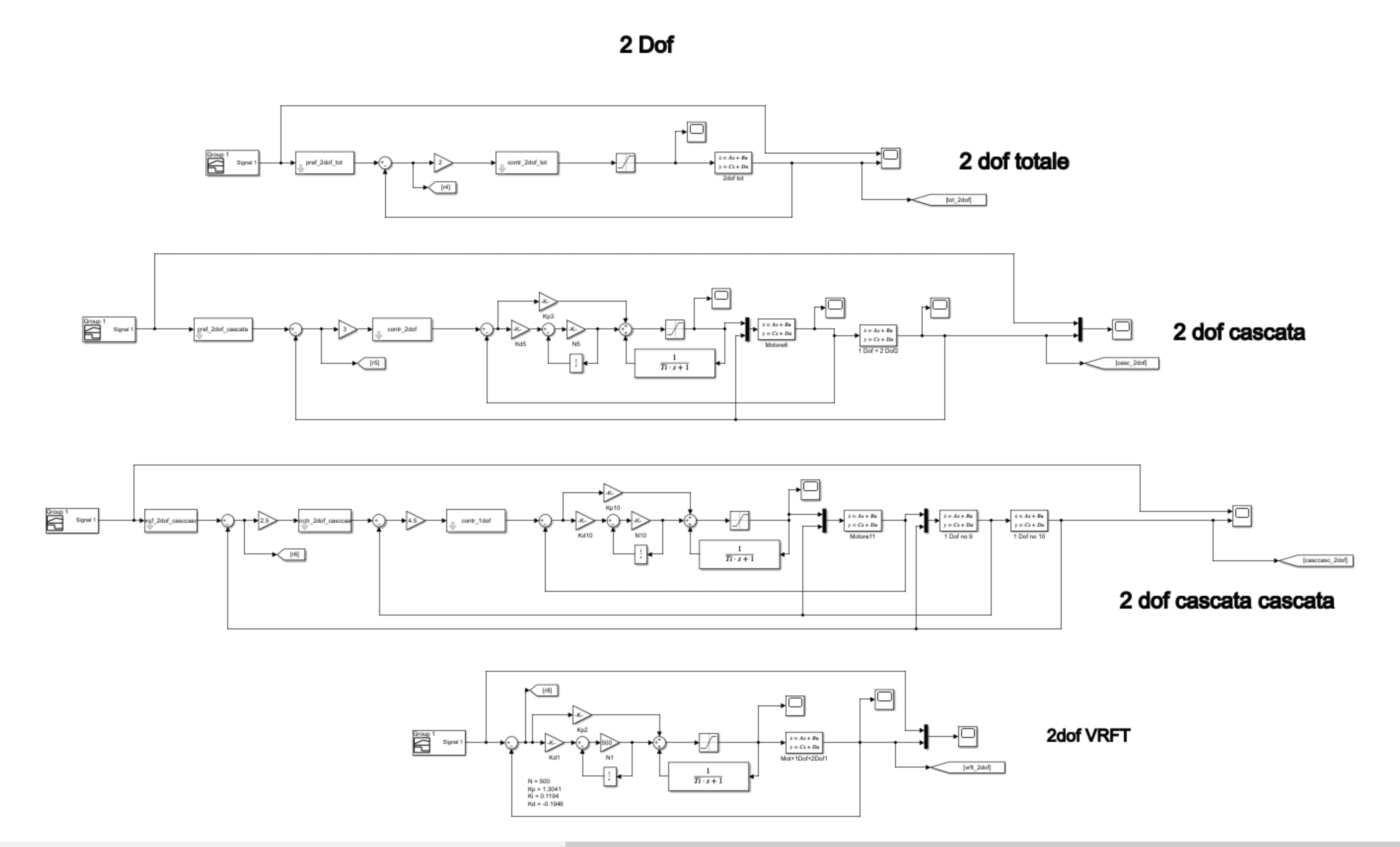
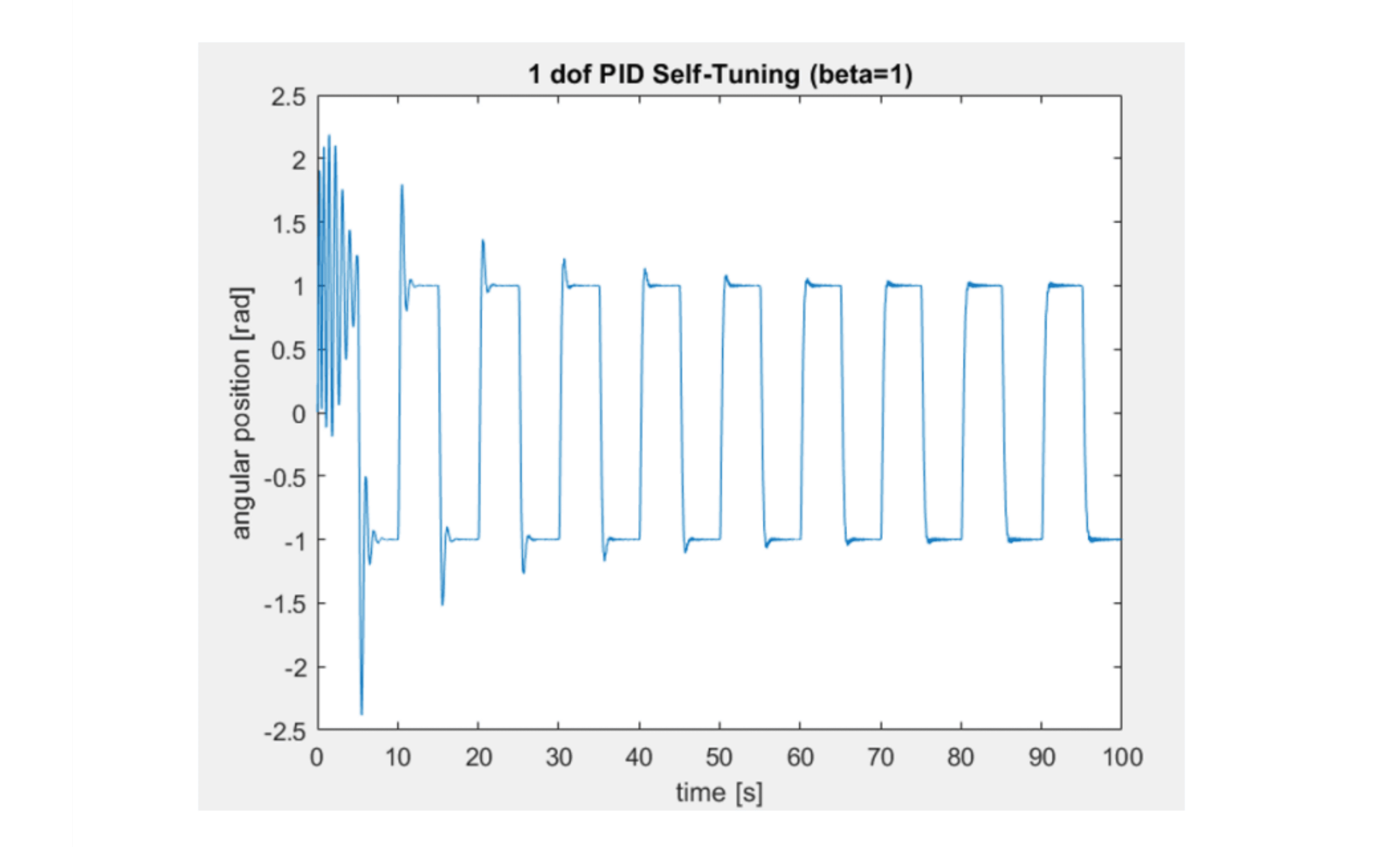
Performed experiments on a Quanser Multi-dof Torsion System to acquire data and model the plant, estimating the uncertain parameters. Designed, simulated and tested different control techniques (from the simplest model-based PID controllers, to the advanced data-driven approaches like VRFT and Self Tuning) through MATLAB and Simulink softwares. The main tasks were to control the position and velocity of the system, attenuating the oscillations, in different configurations: with 1 module attached; with 2 modules; and with some intermediate measurement missing. Prepared a detailed documentation of the design, simulation and testing processes.