Project information
Project Description
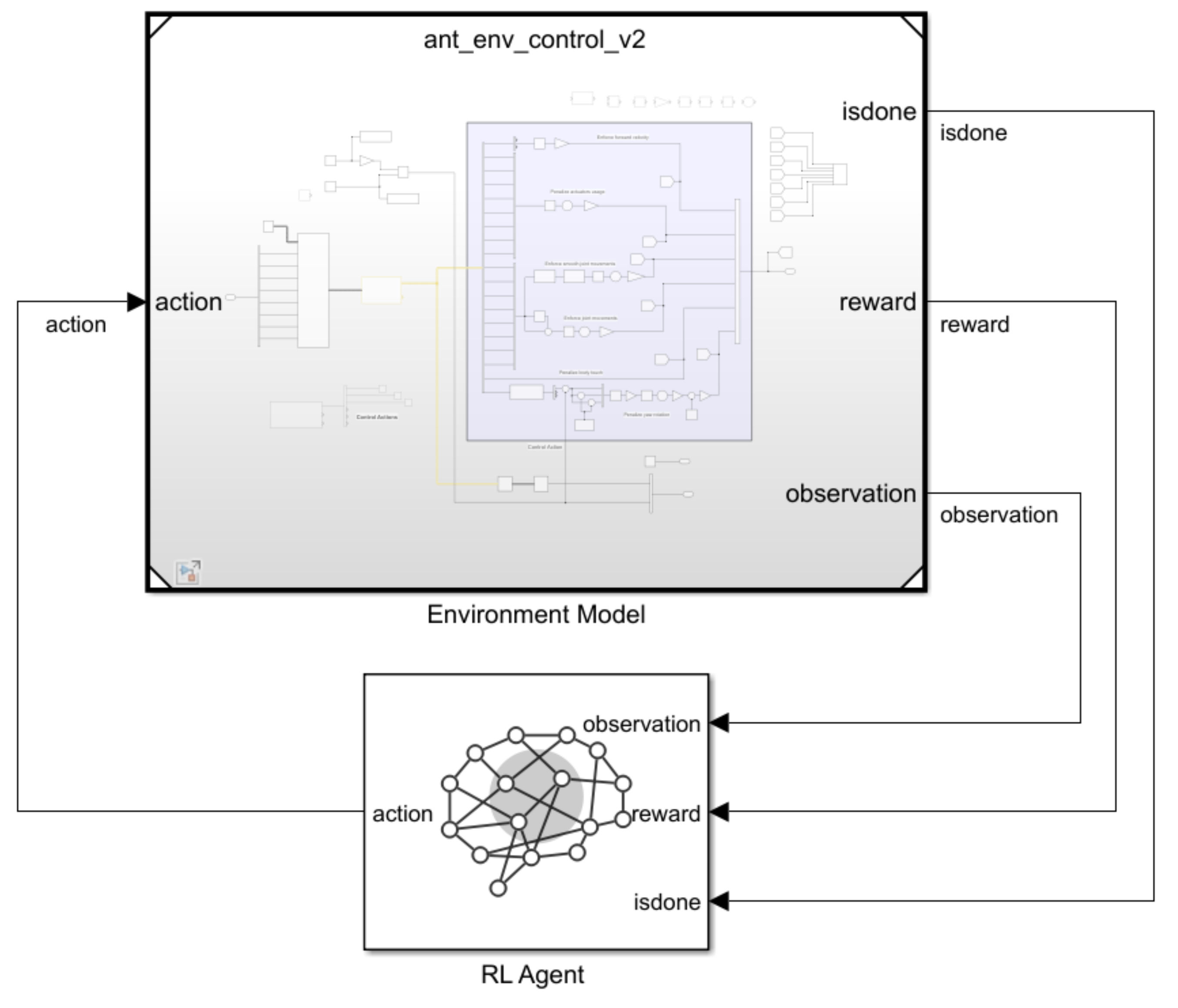
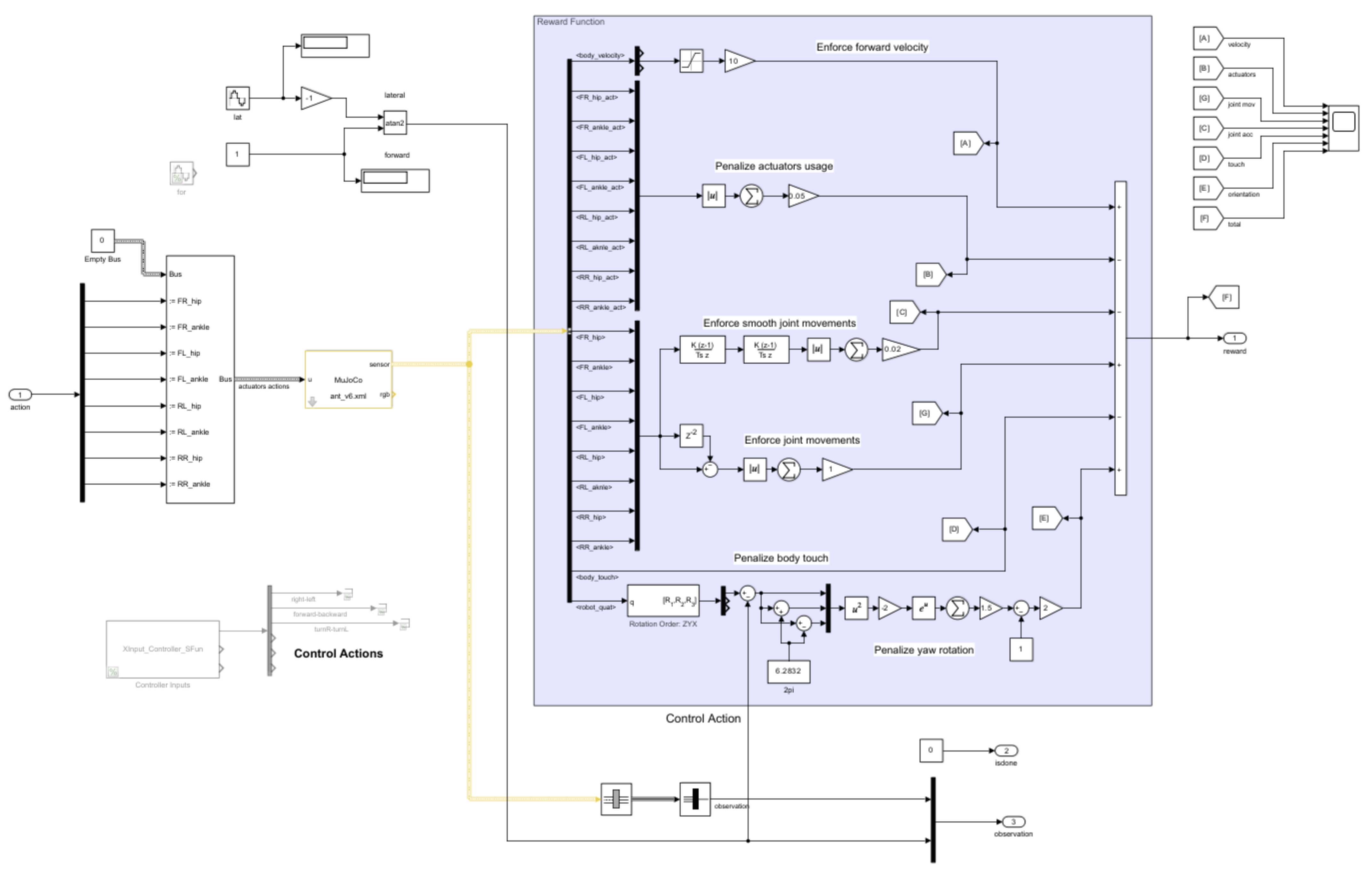
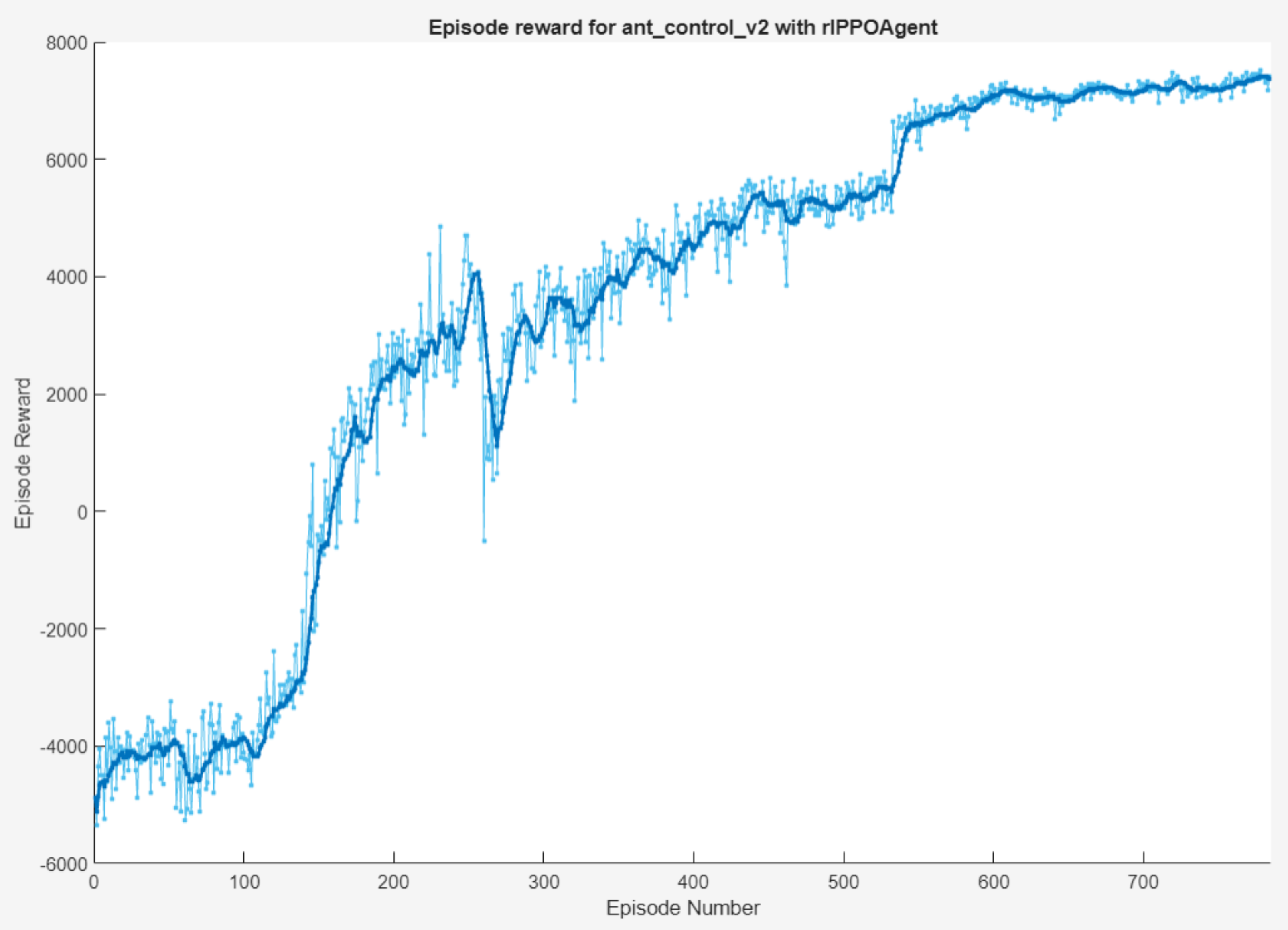
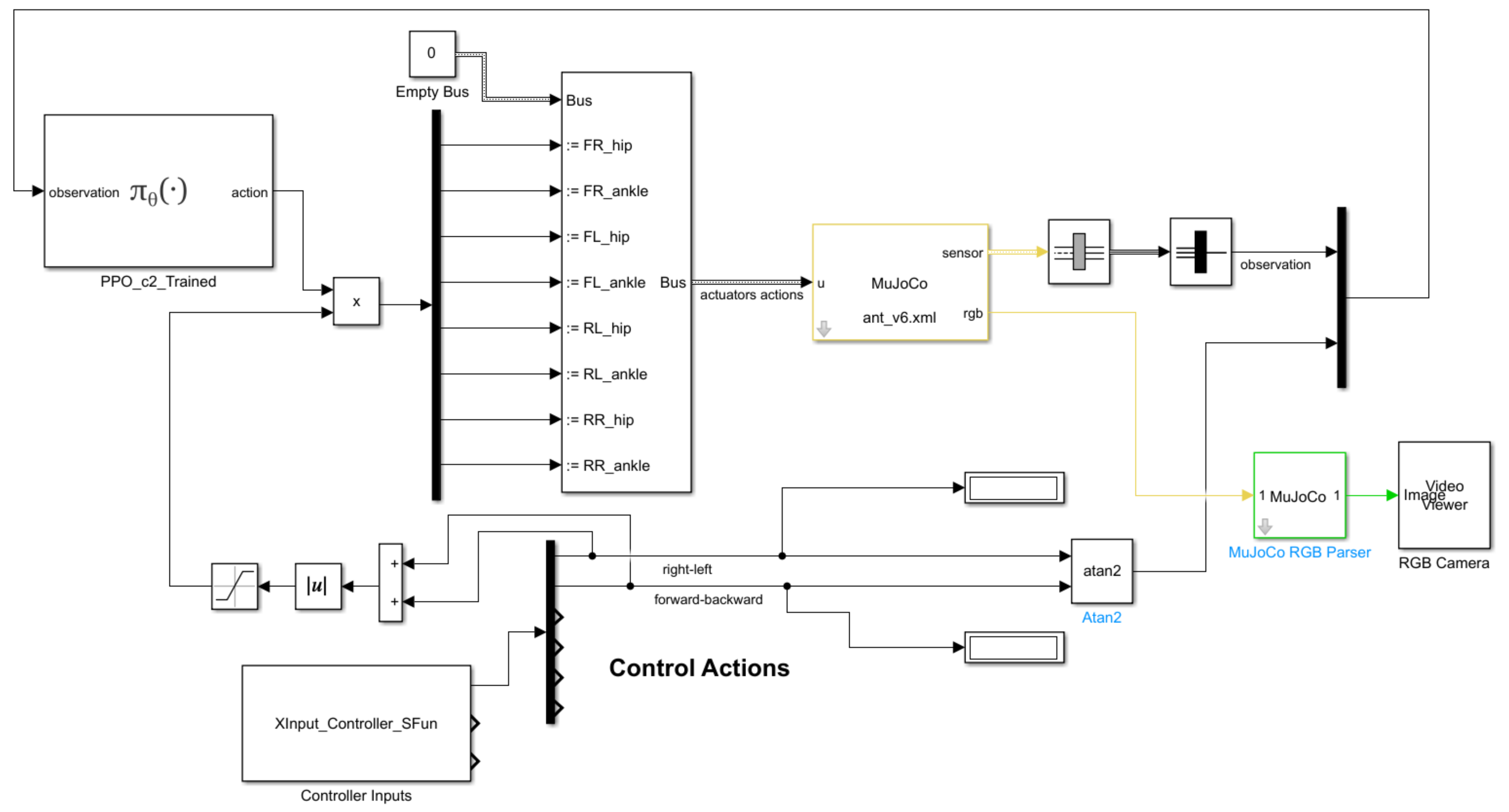
Developed a reinforcement learning framework in Simulink to train a Proximal Policy Optimization (PPO) agent for multi-directional walking control of a MuJoCo Ant model. This project involved designing a custom environment and reward function within Simulink, training through interaction with a control variable simulating a physical controller joystick. The trained PPO agent learned to interpret joystick signals and adjust the ant's walking direction accordingly.