Project information
Project Description
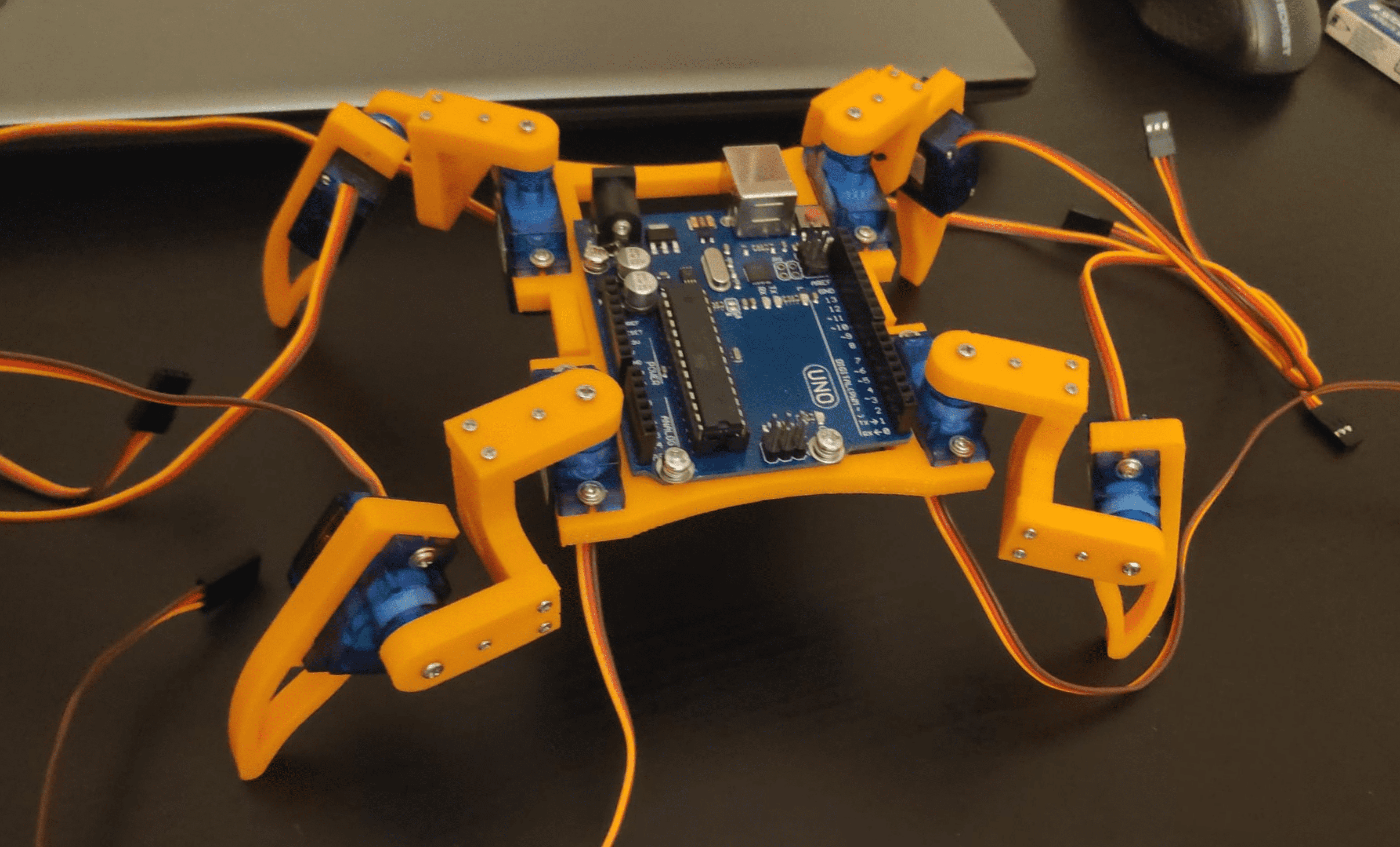
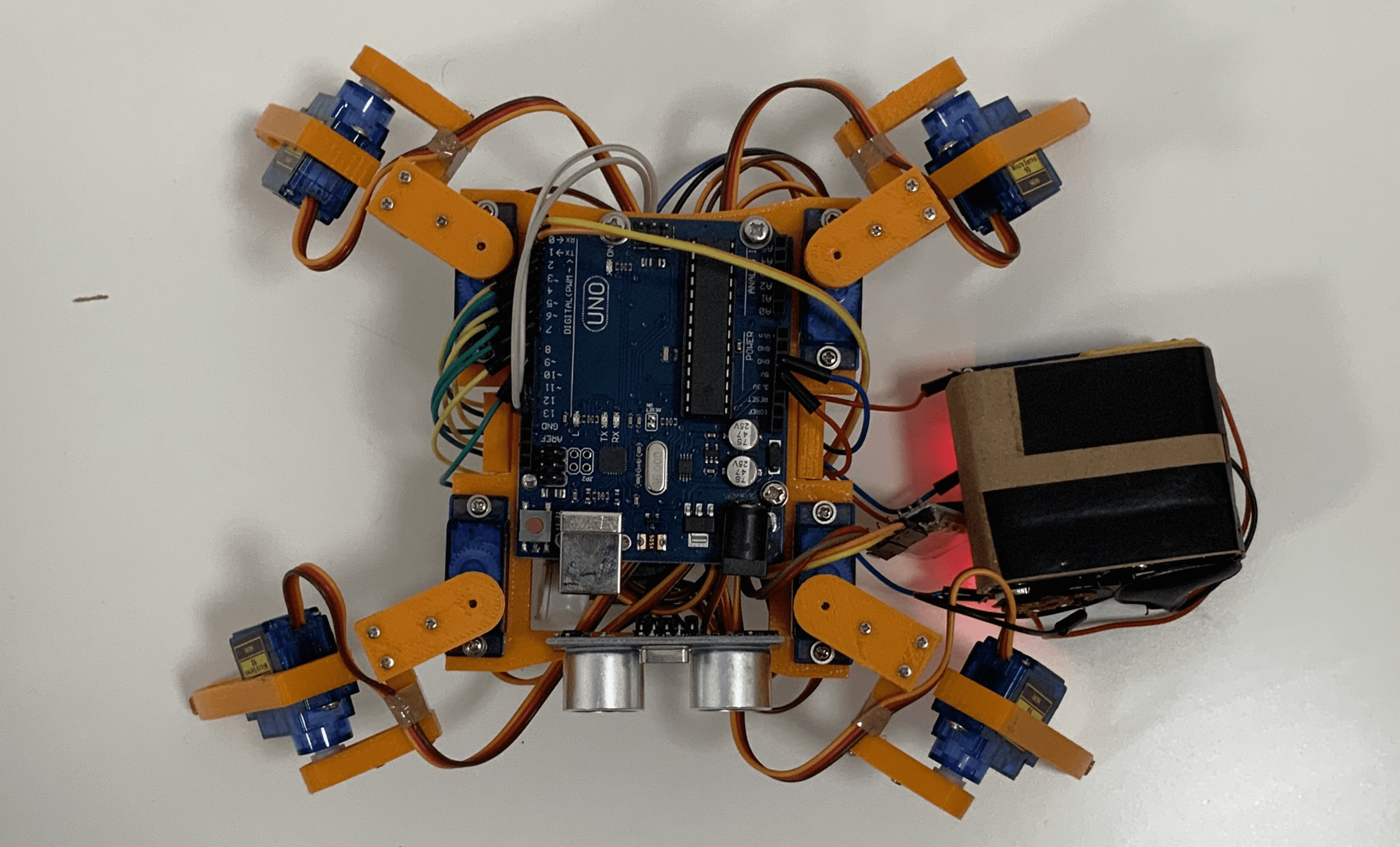
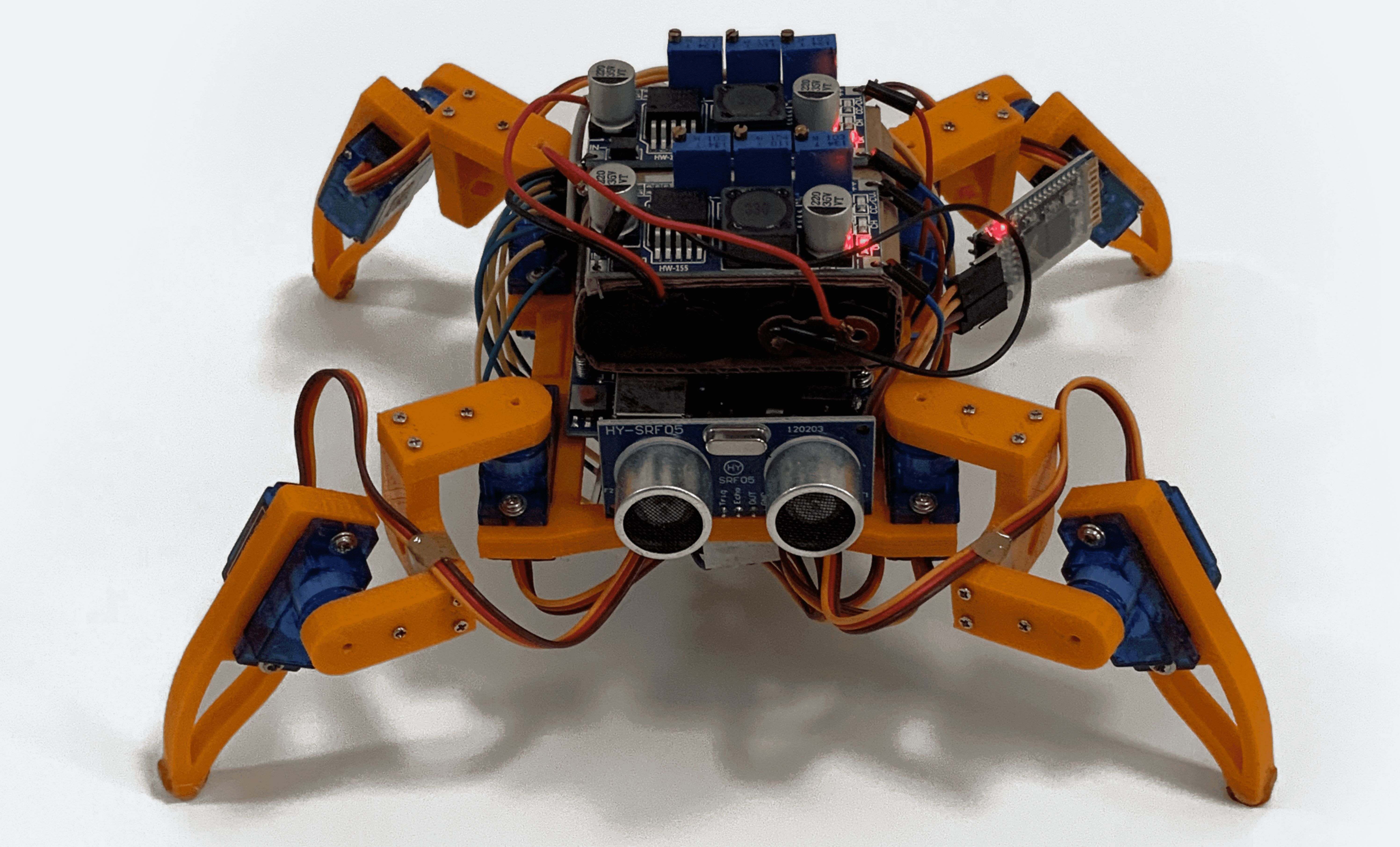
Built a functional 4-legged robot, mounting an Arduino UNO board, 8 servo motors for the legs, a bluetooth module for wireless comunication and an ultrasonic distance sensor. Designed a random policy to make the robot randomly move while collecting data. Next steps: implement a model-free Reinforcemet Learning algorithm in python to make it learn the best policy for walking forward, without being explicitly programmed for.